Photomètre
CIMEL, Photomètre multispectral CE318TS -C : Aérosols.
Installé à bord le 02/01/2021 avant la campagne en mer SWINGS.
Petit récap instrumental
Caractéristiques Instrument / [PC d'acquisition]{.has-inline-color .has-vivid-cyan-blue-color} / [Trimble]{.has-inline-color .has-luminous-vivid-orange-color}
Numéro Réseau AERONET : 1273
Numéro Inventaire UR 29439
Numéros de série Head number : T203-1700-1902\ Control Box number : 2009-127 / UA 5273B / T 1713 TS\ Collimator : CL 211 -- 1402-- 1517
Processeur [Intel Atom 1.91 GHz]{.has-inline-color .has-vivid-cyan-blue-color}
RAM [8 GB]{.has-inline-color .has-vivid-cyan-blue-color}
OS [Windows 10 Enterprise LTSC 64 bits]{.has-inline-color .has-vivid-cyan-blue-color}
IP [172.16.131.31]{.has-inline-color .has-vivid-cyan-blue-color} / [169.254.1.0/1]{.has-inline-color .has-luminous-vivid-orange-color}
GW / DNS [172.16.131.254]{.has-inline-color .has-vivid-cyan-blue-color}
Nom réseau [ACQ-CIMEL]{.has-inline-color .has-vivid-cyan-blue-color}
ID session [PC]{.has-inline-color .has-vivid-cyan-blue-color} / [admin]{.has-inline-color .has-luminous-vivid-orange-color}
Mot de passe [mapio!974]{.has-inline-color .has-vivid-cyan-blue-color} / [Mariondufresne!12]{.has-inline-color .has-luminous-vivid-orange-color}
PI Philippe Goloub (philippe.goloub\@univ-lille.fr)
Position console Switch PC [11]{.has-inline-color .has-vivid-cyan-blue-color}
ID / PWD Anydesk [375 936 146 / mapio!974]{.has-inline-color .has-vivid-cyan-blue-color}
ID / PWD TeamViewer [1 000 236 909 / mapio!974]{.has-inline-color .has-vivid-cyan-blue-color}
Historique de l'instrument
Le photomètre est arrivé au LACy début novembre 2020. Il a été installé le 08/01/2021 à bord du Marion Dufresne.
Calendrier des maintenances
Toutes les semaines Contrôler les câbles
A chaque escale Contrôler et nettoyer la tête et le robot si sel\ Contrôler la position de l'encoche du collimateur\ Contrôler l'oxydation des cosses de batterie et des fixations du coffret électrique et du robot
Tous les ans Changer le filtre de la pompe
Tous les 2 ans Changer les membranes de pompe
Si nécessaire Manip sur demande du LOA
Brève description de son fonctionnement et conseils
- C'est un radiomètre qui pointe le soleil ou la lune toutes les 3 minutes, si le vent (\< 12,5 m/s ≈ 25 nœuds ≈ 45 km/h) et la pluie (0 précipitations) le permettent.
- C'est un photomètre mobile qui pointe le soleil ou la lune et mesure l'AOD (spectral aerosol op3cal depth) et la radiance du ciel. Il y a 3 GPS qui permettent au photomètre de trouver les soleil.
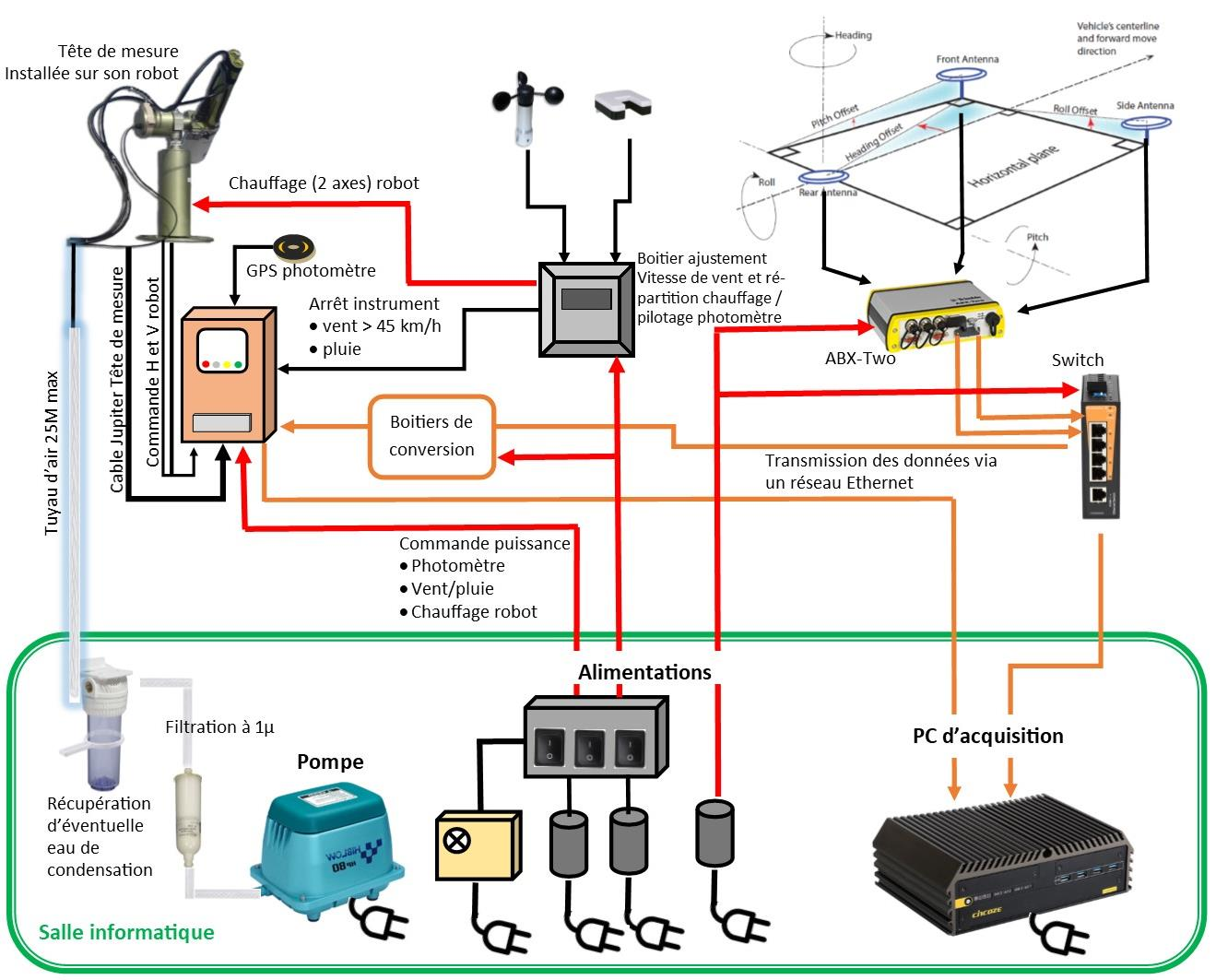
- L'ensemble est composé de :
- Au pont H (salle météo) : PC d'acquisition, boîtier de commande du photomètre, les alimentations, la pompe du système anti-embruns.
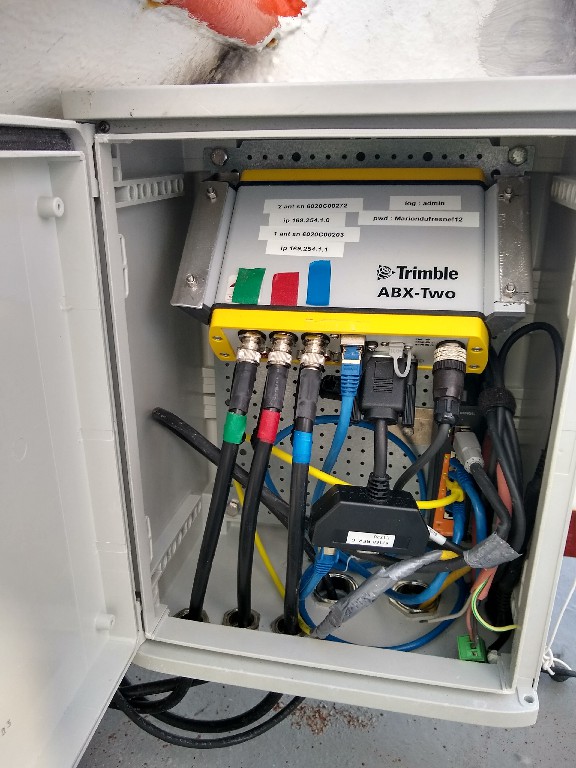
- Au pont i : 3 GPS répartis sur tribord, reliés à un coffret contenant la centrale ABX-Two.
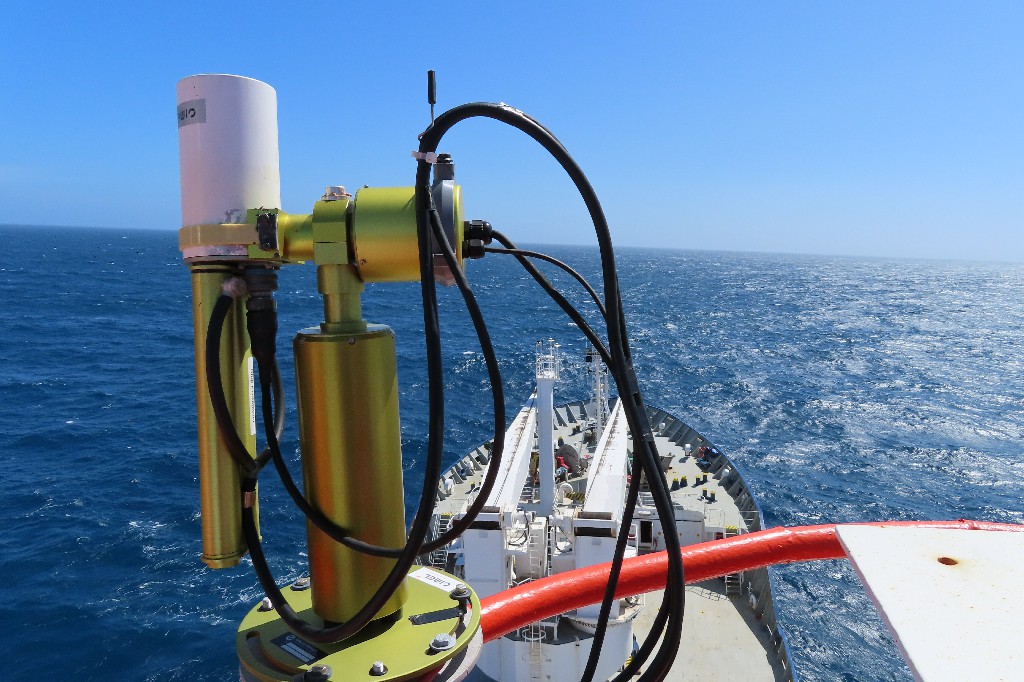
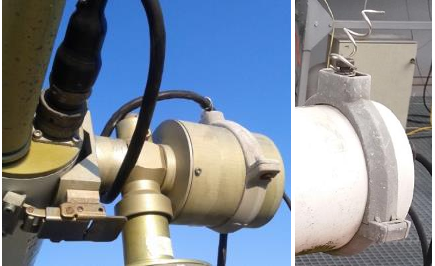
- Au pont J (poignée) : un anémomètre et un capteur de pluie, un système anti-embruns, un robot, une tête photométrique et une boite de contrôle avec Datalogger.
- Le système anti-embruns envoie de l'air en surpression de la salle météo vers le collimateur pour empêcher le dépôts d'embruns sur les optiques. La pompe doit fonctionner en permanence, même si le photomètre est à l'arrêt !
Lors du contrôle du photomètre (PDF), il faut vérifier que :
- La tête du photomètre s'active toutes les 3 minutes (si la météo le permet)
- Les câbles ne sont pas enroulés autour de la tête
- Le câble est bien fixé au photomètre par la queue de cochon
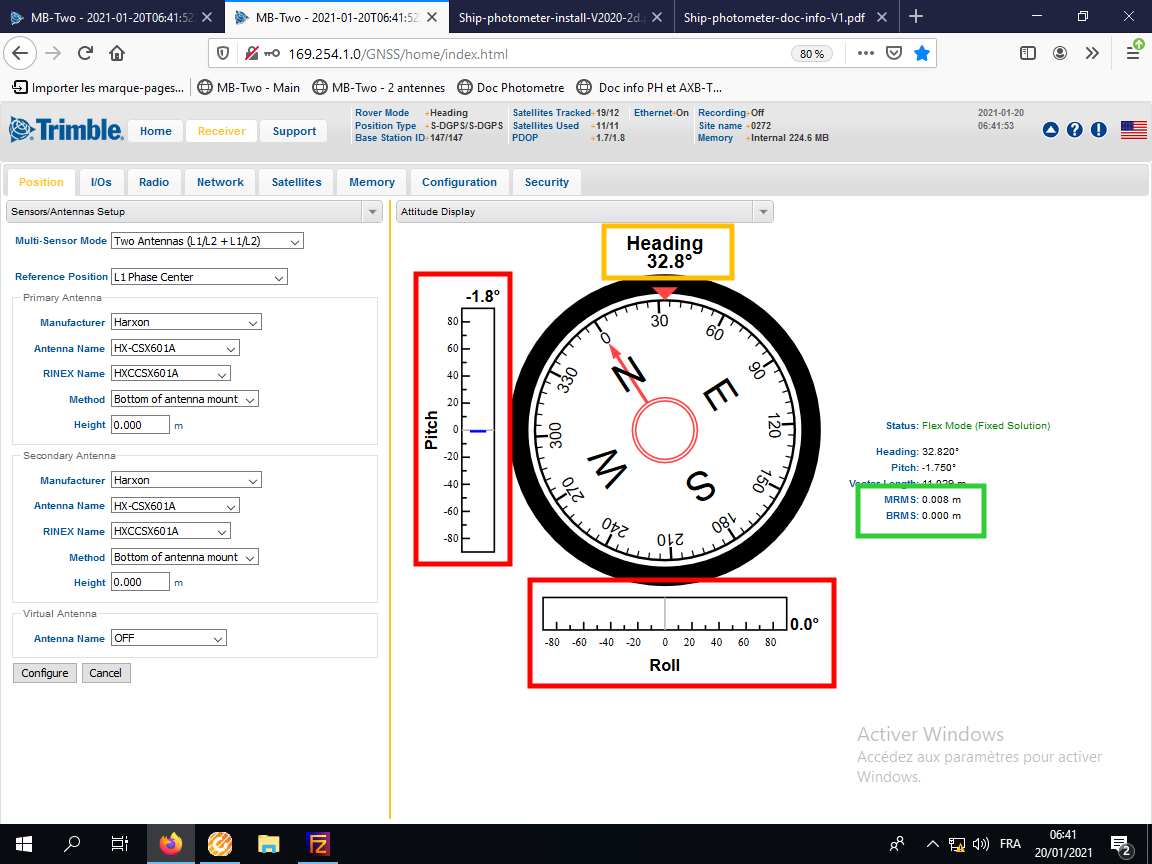
- Les données Trimble arrivent sur le PC (voir ci dessous) pour les 3
antennes :
- Le cap (encadré jaune, Heading) est presque celui du bateau (0.1° près) ;
- Le Pitch et Roll (encadrés rouges) proche de 0 en cas de mer calme ;
- L'erreur de position des antennes (encadré vert) très basse.
- Si une croix apparaît sur le compas ponctuellement, ce n'est pas grave. Si elle reste en place de manière durable (plus de qqs minutes, et si le bateau change de cap), prévenir le LOA.
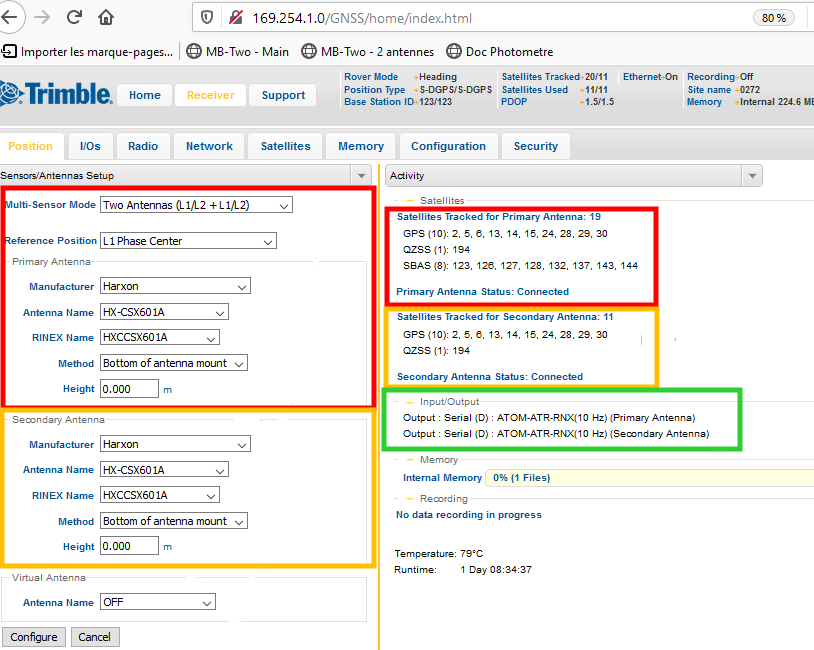
- Les antennes reçoivent bien leur données satellites (encadrés rouges et jaunes) ;
- Les informations sont envoyées à la carte Main (encadré vert)
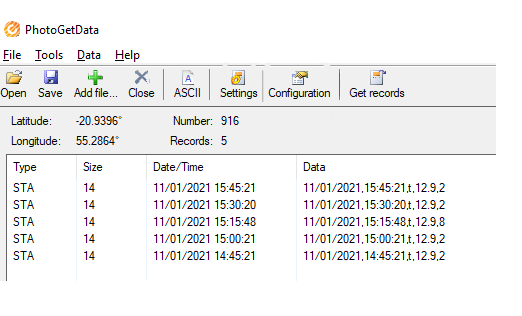
- Les données du Photomètre arrivent sur le PC (logiciel PhotoGetData) :
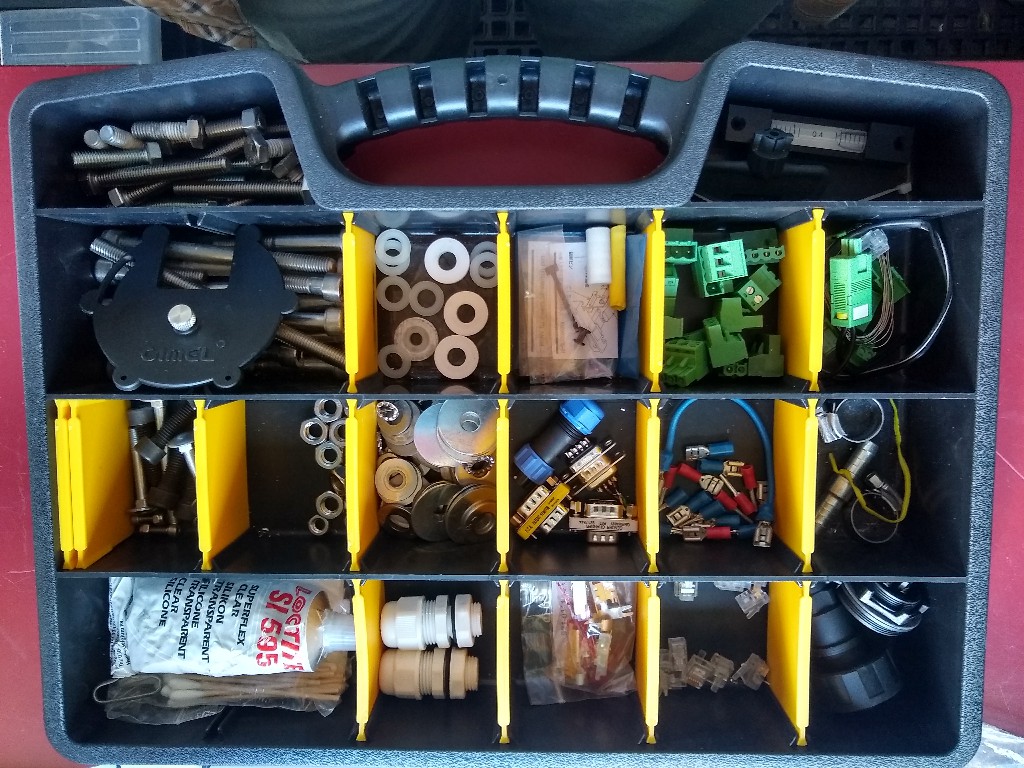
Inventaire du matériel de l'instrument
Dénomination Quantité Tête + robot photomètre 1 Anémomètre + capteur de pluie 1 Datalogger 1 Coffret électrique 2 GPS 3 Concentrateur GPS 1 Bol de décantation 1 Pompe 1 Filtre 1 Tuyau système anti-embruns 20m Boulons + rondelles 20+ Prises réseau 5 Dominos élèctriques 10+ Graisse 1 Membranes de pompe usagées 2 Batteries 2 Outil ouverture Filtre 1 Queue de cochon 1 Câble batteries 1 Extender Mâle et femelle 1 de chaque Filtre interne pompe 1 Petit matériel -
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Documents utiles
- Manuel utilisateur (EN - CIMEL)
- Manuel utilisateur (FR - LOA)
- Doc informatique Photometre et ABX-Two
- Brochure photomètre
- Rapport Calibration
Serveur temps
Le PC d'acquisition est synchronisé avec le serveur de temps MAP-IO du bateau (172.16.131.3) toutes les heures.
Récupération des données
Les données se trouvent dans le répertoire
C:\Users\PC\Documents\PhotoGetData
Elles sont enregistrées sous la forme d'un fichier
P0916_MarDuf_aaaammdd.k8
Les données sont accompagnées de deux fichiers journaliers ABX et d'un fichier log complété progressivement.
Ces données sont récupérées via Ethernet et sont stockées sur le serveur du bateau.
Redémarrage de l'appareil (PDF)
- Écrire la date et l'heure TU dans le cahier de laboratoire, le nom de l'instrument et celui de l'opérateur, et noter le nom de la manip.
L'instrument est sur le pont J et est composé d'une tête de mesure et d'une robot. Ce robot fixe le soleil/lune environ tous les 5 à 15 minutes.
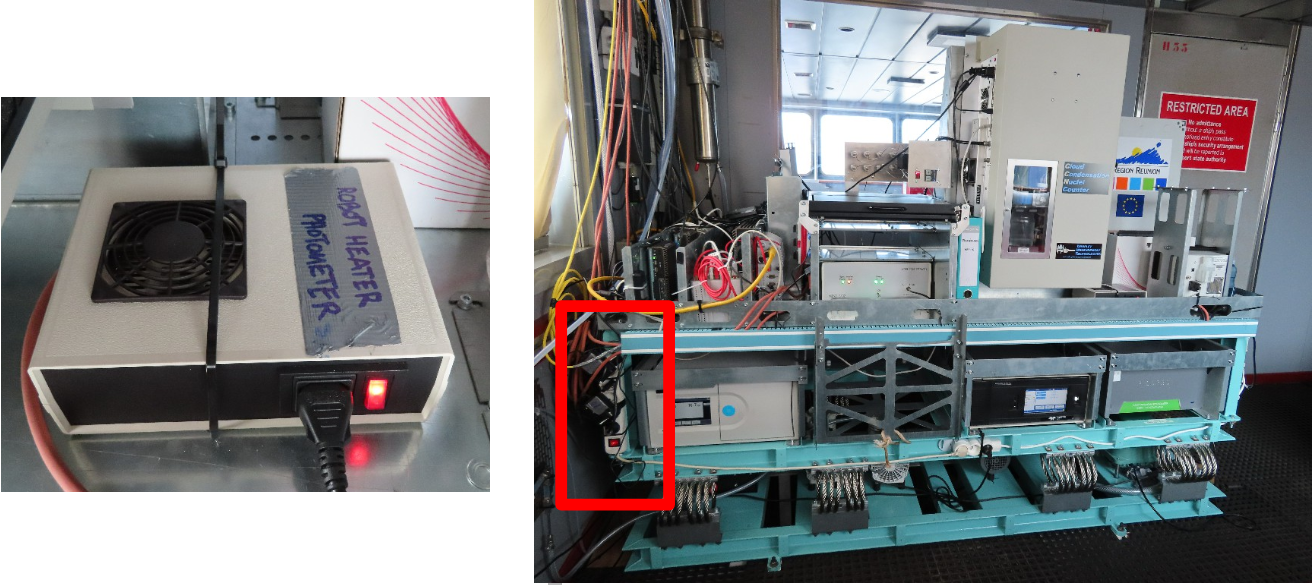
Afin d'éviter que les embruns contaminent les optiques de l'instrument il est impératif que la pompe (photo gauche ci-dessous) soit en fonctionnement CONTINUELLEMENT. Ne pas la stopper même si le photomètre est à l'arrêt ou hors tension. Si elle devait être arrêtée (coupure prolongée du secteur par exemple) prévenir MAP-IO.
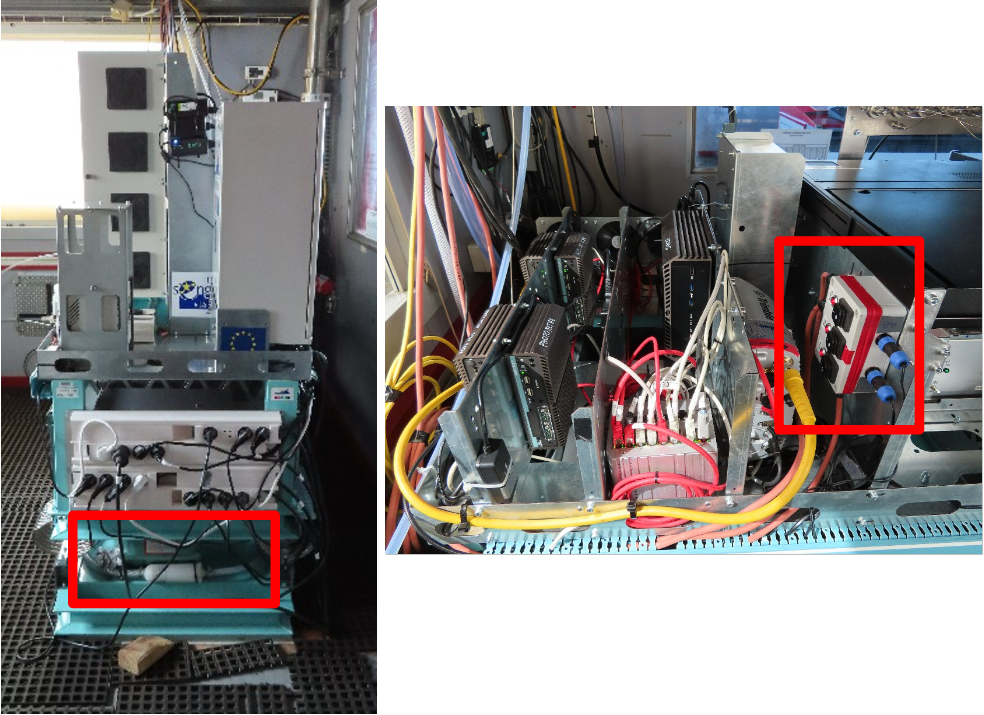
Sur la table amortie, il y a 3 boutons d'arrêt d'urgence (photo droite ci-dessus) :
- Un pour arrêter le photomètre en activant en permanence la pluie (Wet/Wind)
- Un pour le chauffage du robot (Robot heater)
- Un pour l'alimentation du photomètre (SPH)
Éteindre le robot :
En cas d'urgence, de très mauvais temps, de problème important sur la l'installation sans pouvoir agir sur le pont J ou sur demande de MAP-IO :
- désactiver (0) le bouton Wet Wind (led rouge éteinte). Les mouvements du robot du photomètre seront stoppés en forçant la détection de pluie et de vent fort (Wet/Wind)
- Les 2 autres boutons sont utilisés en cas d'intervention sur le
robot et le photomètre ou la demande de MAP-IO
- Un pour le chauffage du robot (Robot heater).
- Un pour l'alimentation du photomètre (SPH)
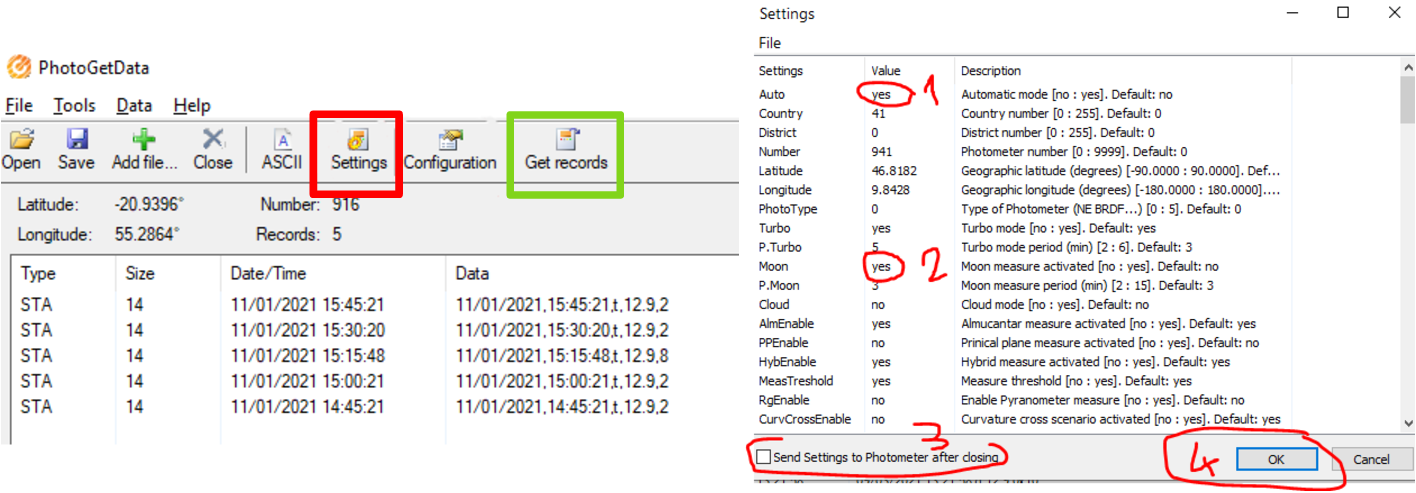
Stopper (ou relancer) les mesures du photomètre :
- Dans le menu PhotoGetdata, choisir Settings (photo gauche ci-dessous, encadré rouge) :
-
Dans la fenêtre Settings (photo droite ci-dessous) :
-
cliquer sur yes pour le passer à no (mesures SUN) ou de No à yes pour une relance.
- cliquer sur yes pour le passer à no (mesures Moon) ou de No à yes pour une relance.
- cocher la case pour valider le transfert des modifs vers l'instrument
-
cliquer OK pour faire la modif.
-
Pour vérifier si les modifs sont bien passés, recharger les données en faisant un Get reccords (photo gauche ci-dessous, encadré vert) puis à nouveau Settings, et contrôler les mises à jours (YES->NO ou l'inverse NO->YES pour une remise en route).
- Dans le cas d'une relance vérifier visuellement sur le pont I que le photomètre se met en mode mesure (voir photo fin de procédure).
Mettre hors tension le photomètre pour une longue durée :
Sur demande de MAP-IO et dans cet ordre :
- Désactiver le bouton d'alimentation SPH : le photomètre et le robot ne seront plus alimentés.
- Désactiver le bouton Robot Heater, et éteindre l'alimentation du chauffage également (photo gauche ci-dessous).
- Au point J, dans le boîtier électrique, débrancher la batterie du photomètre.
Mettre hors/sous tension les GPS et la centrale ABX :
- Débrancher la prise étiquetée ABX de la multiprise à gauche de la table (photo droite ci-dessus).
- Rebrancher pour la relancer et vérifier le retour centrale sur l'écran PC de contrôle (ajouter un capture écran attitude OK). Le redémarrage (attitude ok) peut prendre 15mn.
Remettre en route le photomètre après une longue durée :
Sur demande de MAP-IO et dans cet ordre :
- Rebrancher la batterie dans le boîtier électrique du pont J (si débranchée).
- Rebrancher les prises débranchées.
- Activer le bouton d'alimentation SPH (si éteint).
- Activer le bouton Robot Heater et son alimentation (si éteint).
- Activer le bouton Wet Wind et contrôler la réactivation du robot depuis le pont i (voir photos ci-dessous).

Maintenances diverses
Contrôler les câbles
Si les câbles sont emmêlés autour du robot, il faut les déroulés. Il suffit de tourner manuellement délicatement le robot du nombre de tour nécessaires. Le robot reprendra sa position de repos au début de la prochaine mesure.
Si le câble Jupiter est sorti de la queue de cochon ou si celle-ci est cassée / décrochée, il faut tout remettre en place au plus vite. Sinon, le câble va empêcher un track précis en déstabilisant la tête.
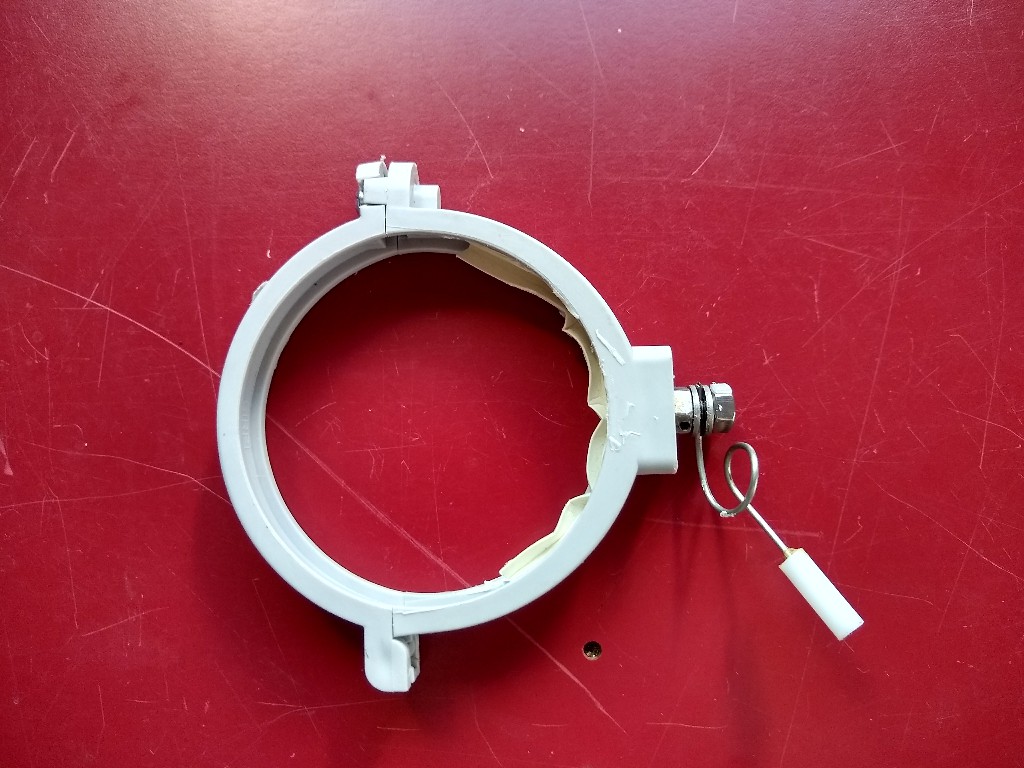
Contrôler la position de l'encoche du collimateur
Si le photomètre fait des tours complets, il est possible que l'encoche ne soit plus en face du collimateur. Il faut alors tourner manuellement et délicatement le robot pour le remettre en position initiale.
Il faut également nettoyer le collimateur au coton-tige et à l'eau douce à chaque escale.

Contrôler et nettoyer la tête et le robot
Nettoyer l'ensemble avec de l'eau douce, si présence de cristaux de sel sur le robot ou la tête. Ne jamais nettoyer ou toucher les optiques !
Contrôler les cosses de batterie si oxydation
Vérifier les cosses des batteries, contrôler TOUTES les connexions des batteries et les nettoyer si oxydation.
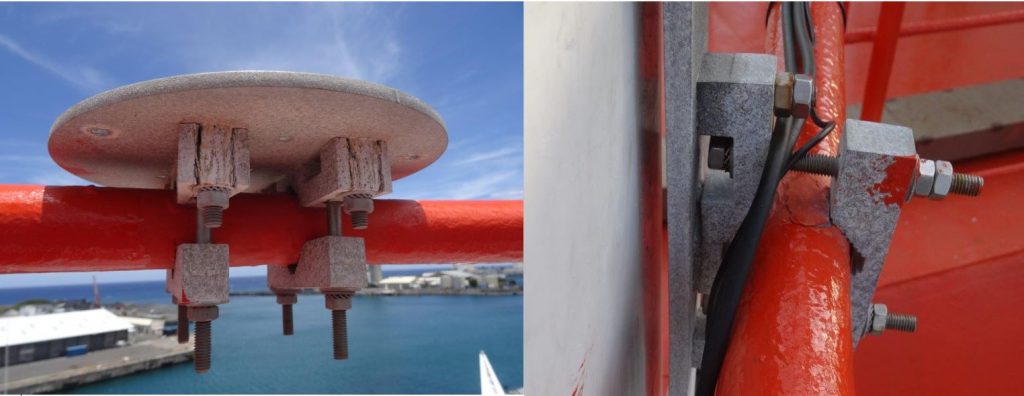
Contrôler l'oxydation des fixations du coffret électrique et du robot
Vérifier les fixations alu des éléments sur la rambarde. Un gros feuilletage était visible au retour de l'arrêt technique de Singapour, et certaines pièces étaient fendues. La visserie Inox sur les pièces Alu a provoqué un effet pile considérable.
Contrôler les capteurs de vent et pluie
Vérifier le bon fonctionnement de la sonde de pluie et de l'anémomètre sur l'afficheur LCD, sinon vérifier la bonne connexion des différents éléments. Tester en passant la main dans le U de la sonde de pluie plusieurs fois pour voir se mettre en sécurité le photomètre et entendre le relais s'activer ou voir sur le boitier photomètre le statut WET apparaitre. (Menu MESURES, descendre au paramètre HUMIDITY)
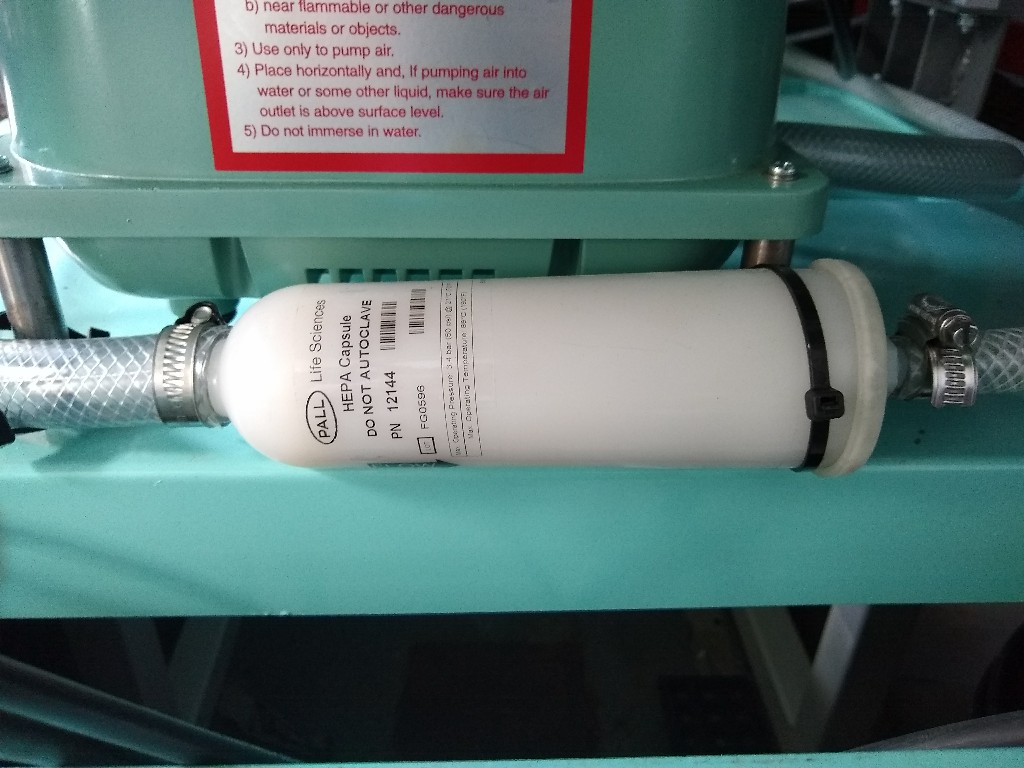
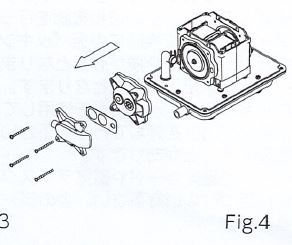
Changer / Nettoyer le filtre de la pompe (PDF)
- Écrire la date et l'heure TU dans le cahier de laboratoire, et noter le nom de la manip et de l'opérateur.
- Débrancher la pompe.

- Démonter le plancher pour accéder sous la table instrumentée.

- Démonter les 4 vis de fixation de la pompe sur la base de la table par dessous et déconnecter les tuyaux d'air.
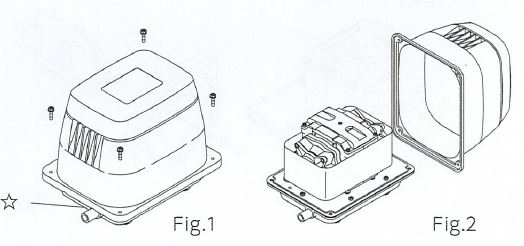
- Une fois la pompe dégagée, retirer la vis centrale de la face supérieure.

- Ouvrir le capot.

- Retirer et nettoyer le filtre à l'air sec ou le remplacer.
- Revisser le capot et remettre la pompe en place.
- Vérifier son bon fonctionnement.
- Remettre le plancher en place.
Changer les membranes de pompe (PDF)
- Écrire la date et l'heure TU dans le cahier de laboratoire, et noter le nom de la manip et de l'opérateur.
- Débrancher la pompe.
- Démonter le plancher pour accéder sous la table instrumentée.
- Démonter les 4 vis de fixation de la pompe sur la base de la table par dessous et déconnecter les tuyaux d'air.
- Une fois la pompe dégagée, retirer les pieds de la pompe à l'aide d'une pince multiprise.
- Retirer les 4 vis maintenant la partie supérieure de la pompe.
- Retirer le capot et la protection textile.
- Il y a 2 membranes à changer, de chaque côté du moteur. Commencer par défaire le tubing noir raccordé au bloc plastique en désserrant la pince prévue à cet effet.
- Défaire les 4 vis de maintient du cache plastique (les débloquer avec une pince plate ou multiprise si trop dur au tournevis). Attention aux têtes de vis !!
- Retirer le cache plastique.
- Défaire la vis centrale maintenant la membrane.
- Remplacer la membrane par une neuve en prenant garde au sens de celle-ci.
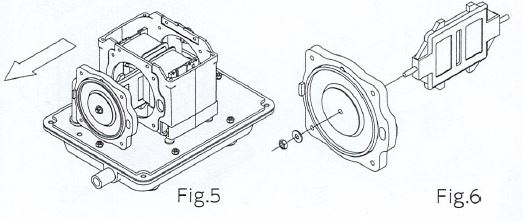
- Répéter ces étapes pour la seconde membrane.
- Remonter les caches plastiques, l'isolant et le capot.
- Replacer les 4 vis, puis les pieds (traces marqueurs côté table).
- Remonter la pompe sur la table et remettre le plancher en place.
Problèmes rencontrés
Mauvais pointage solaire (PDF)
Relever les valeurs des index des 2 moteurs vertical (ZN) et horizontal (AZ) du robot. Ce sont de petits switchs qui permettent au robot de trouver son origine (tête vers le bas pour ZN) avant de commencer une mesure. Si l' (ou les) axe du robot est devisé ou son switchs est déréglé (ou défectueux) il ne se positionne plus au bon point de départ et le pointage solaire devient complément hasardeux.
Dans le boitier Legrand Marina (clé accrochée à un coin), sur le boitier "orange" de commande du photomètre :
- Attendre que le photomètre ne fasse plus de mesure (ne bouge pas) et faire la manip entre 2 mesures
- Appuyer sur le bouton jaune du bornier pour réveiller l'écran :

- Enter sur SCENARIOS (fig. 2)
- Enter sur PARK (fig. 3)
- Noter toutes les valeurs (fig. 4)
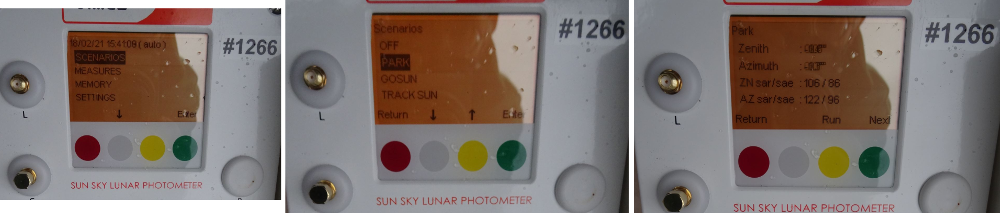
- Répéter l'opération au moins 5 fois (PARK)
- Noter (regarder) où ce PARK le robot en ZN et AZ.
- Est-ce toujours la même position?
- A t il bien la tête en bas (collimateur en bas) ?
- Pour ce robot sar/sae : doit être au max sar=sae+50 et sae autour de 70 max 85 et stable.
Mauvais vissage du collimateur
Suite à l'installation d'un nouveau collimateur entre la campagne SWINGS et l'OP1 TAAF 2021, le signal a été réduit de presque 60%. Après avoir testé de nombreuses manip en post traitement (bateau en mer, pas d'intervention possible), il s'est avéré que le collimateur était mal vissé dans son encoche. A sa remise en place, tout est rentré dans l'ordre.