Plateforme gyroscopique
Watson Industries, Stabilized Mount system : Stabilisation des radiomètres.
Installé à bord le 09/03/2021 avant l'OP1 TAAF.

Petit récap instrumental
Caractéristiques Instrument Numéro Réseau - Numéro Inventaire UR 29444 Numéro de série 0044
Historique de l'instrument
La tête gyroscopique est arrivé au LACy début novembre 2020. Elle a été installé le 09/03/2021 à bord du Marion Dufresne.
Calendrier des maintenances
A chaque escale \
Si nécessaire \
Brève description de son fonctionnement et conseils
- C'est une plateforme gyroscope qui compense le roulis et bagage du bateau (Pitch et roll).
- Le plateau de la tête gyroscope, sur lequel sont installés les radiomètres UV et la caméra imageur de ciel reste en position horizontale en permanence.
Lors du contrôle de l'instrument, il faut :
- Vérifier que les câbles ne sont pas emmêlés. Si oui, abaisser le disjoncteur de la tête gyroscope dans le tableau électrique en salle aérosols. Dès que possible, monter en haut de la tour aérosols et démêler les câbles.
- Vérifier depuis le bas de la tour aérosols que le plateau de la tête gyroscope reste horizontal (à l'appréciation de l'observateur). Si ce n'est pas le cas, aller dans le tableau électrique en salle aérosols, baisser le disjoncteur tête gyroscope puis le relever (Switch OFF/ON électrique).
Inventaire du matériel de l'instrument
Dénomination Quantité
{kind=link}
Câble d'alimentation 8 pins 30 mètres 1
{kind=link}
{kind=link}
Documents utiles
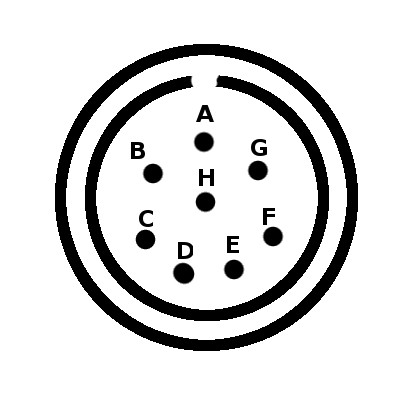
Connecteurs 8 pins
 {.wp-image-819
width="204" height="203"}
{.wp-image-819
width="204" height="203"}
A : -28 V
B : +28 V
C : Non connecté
D : Reception de données (RS-232) depuis la tête (SMS-P233)
E : Signal ground (connecté au -28V)
F : Envoi de données (RS-232) vers la tête (SMS-P233)
G : Non connecté
H : Case ground
Serveur temps
La plateforme n'est pas synchronisé avec le serveur de temps du bateau.
Récupération des données
Les données de la plateforme ne sont pas récupérées.
Il est cependant possible de connecter la plateforme à un PC d'acquisition, si les données d'angle et d'accélération deviennent utiles. Elles seront alors enregistrées sous la forme d'un fichier ASCII tous les 10èmes de secondes. Le séparateur est un espace et les données reçues sont :
Time, Bank angle, Elevation angle, X axis accelerometer, Y axis accelerometer, Z axis accelerometer, X axis angular rate, Y axis angular rate, <CR>
Ces données peuvent être récupérée directement à partir du câble d'alimentation fournis, grace aux pins D et F qui permettent de communiquer avec la tête gyro.
Maintenances diverses
Réglage des butées
Les butées ont été retirées/désactivées. La gîte du bateau n'est pas suffisant pour les atteindre et le réglage horizontal de la plateforme en est simplifié.